【编者按】为了更好地营造校园学术氛围,传播KY.COM学术科研动态,学校在校园网开辟“科技前沿”专栏,定期总结、回顾学校师生取得的科研成果。欢迎广大师生及时把自己的学术科研成果以邮件的形式告诉我们,我们希望获得您以下成果信息:为政府、企业、媒体进行了专业咨询;科技成果通过了相关鉴定;科技成果落地、实现产业化;发表了高水平的学术论文;获得了专利授权;出版、编著了专著、教材;获得了科技奖励;在重要学术会议上进行了发言……
我们愿意为有学术追求的师生搭建一个交流的平台,希望在师生的努力下,学校的学术氛围日益浓厚,让我们为实现电子信息特色鲜明的高水平大学而奋斗。投稿请通过所在单位,经学校OA系统审核发布。
KY.COM信息与通信学院纪元法教授团队的论文Anonymous flocking with obstacle avoidance via the position of obstacle boundary point 在物联网领域顶级期刊《IEEE Internet of Things Journal》(SCI一区TOP,2024年IF=8.2,CiteScore=17.6)发表,该论文引用次数已达到ESI高被引收录论文标准,被收录为高被引论文。
多智能体系统的协同控制算法已应用于许多物联网(IoT)设备,多智能体匿名蜂拥算法是多智能体系统协同控制研究的核心技术。该论文针对多智能体系统协同控制算法中障碍物形状的约束限制问题,提出了一种基于障碍物边界点位置进行避障的匿名蜂拥算法,它不需要智能体个体去分辨其他智能体和障碍物,放宽了障碍物形状约束。在该论文算法中,一致项分为速度一致项和速度单位方向一致项。速度一致项旨在牵引感知到阻碍其跟随的障碍物边界点的代理绕过障碍物,而速度单位方向一致项旨在实现速度单位方向的匹配。此外,基于梯度的项旨在实现代理与障碍物边界点之间的分离和聚合,引导反馈项旨在引导所有代理实现群体目标跟随。最后,通过仿真验证了所提出的算法可以放宽障碍物形状约束,具有更好的环境适应性。
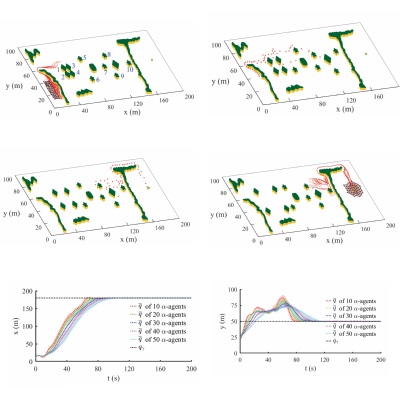
论文相关图集
文章链接:https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=10685497
 桂公网安备45030502000232号
桂公网安备45030502000232号